レーザーラインプローブ (LLP) または ScanArm での複雑な部品の表面のスキャン

概要
最も効率的に、高品質の一貫した結果を得るためには、レーザーラインプローブ (LLP) または FARO ScanArm での複雑な部品の表面のスキャンのためのベストプラクティス(成功事例) を使用します。プロジェクトを開始する前に、ビデオと以下のリストを参照して、確実に非接触スキャンを実現する試行錯誤のあるポインタを確認してください。
ビデオ
このビデオでは、ベストプラクティスがどのように適用されているかをご覧ください。LLP をどのように扱い、どのように体を置いて最も正確な結果を得るかに注意を払ってください。
ベストプラクティス(成功事例)
- スキャンする表面の種類に応じて、適切に LLP の角度を決めます。
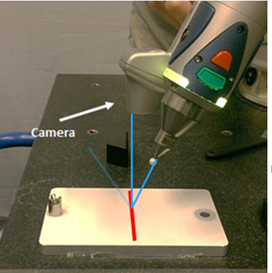
- 反射率が低いかまたは光沢のない表面の場合、レーザー光線の角度をワークの表面に対して直角にする必要があります。これにより、カメラでレーザーからの反射のほとんどを取り込むことができます。

- 反射率が高い表面の場合、レーザー光線の角度をワークの表面に対してある程度の角度にする必要があります。ワーク表面に対して直角にカメラ を設定することで、最適な角度を達成します。これにより、ノイズ反射をカメラの外に反射させることができます。
- 反射率が低いかまたは光沢のない表面の場合、レーザー光線の角度をワークの表面に対して直角にする必要があります。これにより、カメラでレーザーからの反射のほとんどを取り込むことができます。
- V3 または ES LLP を補正する場合、[標準]アルゴリズムから開始し、表面の仕上げに合わせて[詳細]設定を調整します。
- [標準]設定は、暗すぎず、光沢のない表面に適しています。照射が自動的に 0~50 の範囲で調整されます。
- [フル]は、暗く光沢のない表面に適しています。照射が自動的に 0 から最大の範囲で調整されます。
- [高反射率]は、反射率の高い表面に適しています。照射が自動的に 0 から最大の範囲で調整され、光沢の管理を改善するためにその他の設定も調整されます。
- HD LLP を補正する場合、[自動 - 標準]アルゴリズムで開始し、表面の仕上げに合わせて、設定およびフィルタを調整します。
- [反射フィルタ]では、明るい表面で生じたデータのノイズを削除します。
- [自動 - HDR]アルゴリズムでは、暗い領域と明るい領域の間の、高コントラスト領域を正規化します
-
部屋の照明条件がスキャンの品質に大きく影響する場合は、固定露光でスキャンしてください。Normal 「ではなく 」Fixed Exposure "でスキャンすることで、外部照明がカメラセンサーを妨害しても、一貫したデータ品質を保証します。ユーザーは400ミリ秒から開始し、部品表面の明暗に応じて露出を調整できます。
-
LLPを一定の距離ワークの表面から離して保持し、ワーク上で LLP 移動させてノイズを減らします。LLP を近くで保持すると、遠くで保持した場合よりも点密度が増えます。距離が遠いとノイズが増加する理由として、レーザー光が表面へ到達してからカメラに戻るまでの移動距離に関係しています。レーザー光の移動距離が長くなると、距離が短かった時と比較して、戻り信号が不明瞭になります。これは懐中電灯の光線に似ています。光線を近くを照らすと、ライトが明るく見え、光線のエッジがより明瞭になります。光線を遠くで照らすと、ライトの明るさが低下したように見え、光線のエッジがより不明瞭になります。
- [設定]ダイアログボックスで高精度モードに設定します。この設定は、ファーフィールドのスキャナより遠い点をフィルタします。これにより、フィールドの深さが約 115 mm から 32 mm に減少し、光沢のない仕上げの校正済みの表面のテストで、スキャンノイズが約 50% 減少します。 V1、V2、V3 および ES で高精度モードを設定すると精度を上げることができますが、HD モデルでは、ノイズが大幅に減少するだけです。
- グリップハンドルをしっかりと保持して、LLP をワークの表面上まで移動させます。回転させることは避けてください。
- ワークの表面が LLP の遠くではなく、LLP の近くになるようにします。
- 角で接する表面をスキャンする場合、隣接する表面の一方をスキャンしてから、もう一方をスキャンします。最初に、一方の表面に対して直角に LLP を配置し、その表面を完全にスキャンして、停止します。次に、隣接する表面に対して直角に LLP を再配置し、その表面を完全にスキャンして、停止します。隣接する 2 つの表面の角で回転するように LLP を移動させないでください。
- スキャン時には、伸ばし過ぎないでください。スキャン時には、スキャンするワークのセクションが、その姿勢で無理なく手が届く範囲に入るように、体、腕および手を配置します。
- スキャンプロジェクトを論理的なワークに分割し、ベストプラクティス(成功事例) に従ってスキャンできるようにします。
次も参照
- どの設定を変更すれば、レーザーラインプローブ (LLP) で最適な品質を得ることができますか
- FARO ScanArm、またはレーザーラインプローブ (LLP) でスキャンするときに、どのようなスプレーパウダーが明るい表面の反射を軽減しますか
キーワード:
角のスキャン、複雑なワークのスキャン、困難なワークのスキャン、LLP の保持、LLP の向き、LLP の通常の位置