SCENE:パノラマ画像を使ったスキャンの着色

こちらのアーティクルでは360°パノラマ写真を使用しSCENEのスキャンにカラーを適用する方法を説明します。
可能な限り高解像な360°のパノラマイメージを使用してください。カラー化の品質に影響します。
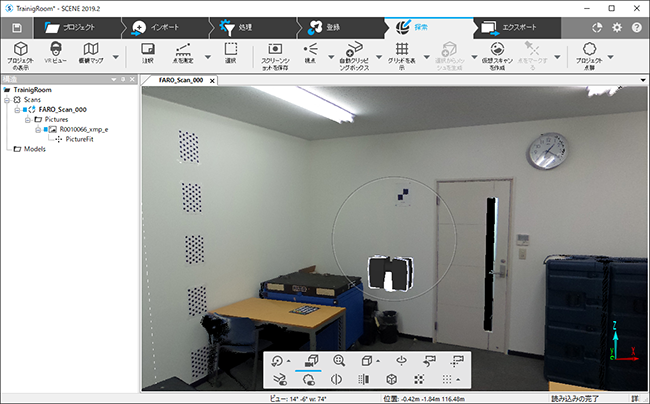
1. SCENEに一つのスキャンをインポートし構造ビューに表示します。
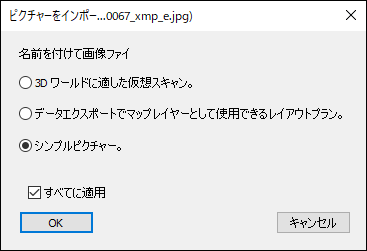
2. パノラマ画像をSCENEにドラッグ・アンド・ドロップし、開いたダイアログで「シンプルピクチャー。」を選択してOKをクリックします。
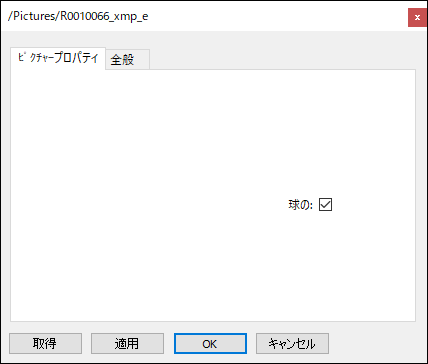
3. インポートした画像を右クリックしてプロパティを開き、「球の」チェックを入れてOKをクリックしてダイアログを閉じます。
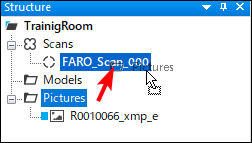
4. 「Pictures」フォルダをスキャンポイントへドラッグ・アンド・ドロップしてスキャンに画像を追加します。
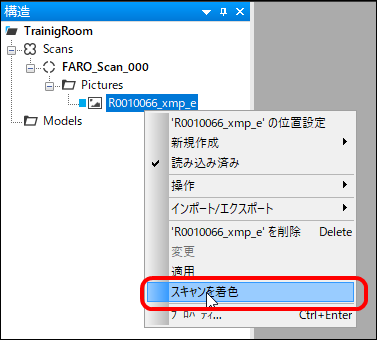
5. 画像を右クリックし「スキャンを着色」を選択します。
6. データの読み込みが完了するまでしばらくお待ちください。 読み込みが完了すると「 スキャンを着色」ダイアログが表示されます。
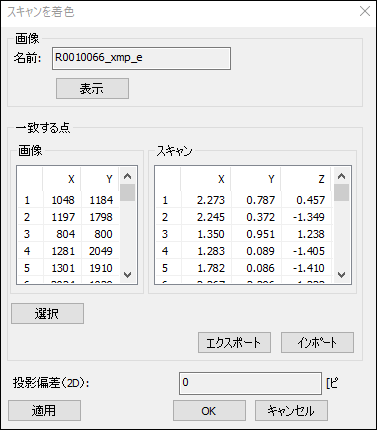
「スキャンを着色」ダイアログの「表示」ボタンをクリックしてピクチャービューと平面ビューを開きます。
「選択」をクリックして、一致する点の組み合わせを検索します。
少なくとも6点の一致する点を選択する必要があります。
点は指定する任意の順序で選択できます。最初にスキャンの「平面ビュー」のすべての点を選択してから、ピクチャービューで選択することも、逆の順序で選択することも可能です。または、平面ビューとピクチャービューを交互に切り替えて、点をペア単位で選択することもできます。
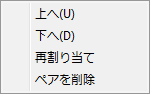
「選択を変更」選択を変更する場合、点の順序の変更、点の再割り当て、ペアの削除が可能です。この場合、[スキャンを着色]ダイアログの対応する表で点を右クリックし、適切なコマンドを選択します。
3 次元のすべてに対応していることを確認します! 点は事実上、平面には配置するものではありません。適切な長さ、幅、深さでボックスを広げるのが目的です。
ある程度の余裕を考慮して、6 組以上選択してください。
7. 選択が終了したら、[適用]か[OK]を押します。
位置、方向、ズーム係数が計算され、色情報が各スキャンポイントに追加されます。
新しいビューを開いて、スキャンをカラー表示します。スキャンですでに開かれている平面ビューは変更されません。
[スキャンを着色]ダイアログには、選択した 3D ポイントの 2D 投影と、ピクチャーで選択されている対応する点との間の平均距離を計算して求められた投影の品質に関する情報が表示されます。この距離は投影偏差(2D)と呼ばれ、ピクセルで測定されます。
満足のできる結果が得られない場合、グレイ画像のリストアを行い、選択した点の一部を調整し、再度試みます。また選択した点のリストをファイルにエクスポートし、翌日作業を続けることもできます。