レーザースキャナのベストプラクティス

概要
慎重に計画し、スキャンの原理を理解することは、効率的かつコスト効率の高い方法で正確かつ専門的なスキャンをキャプチャするのに不可欠です。これらのガイドラインは、スキャンプロジェクト中によく経験する、共通の問題に対処するのに役立ちます。
サイトスケッチ
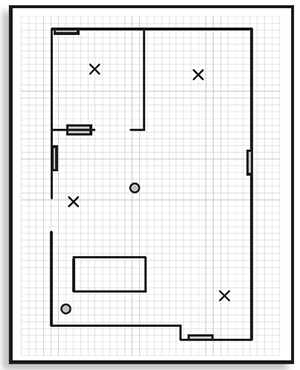
スキャンサイトを迅速にスケッチすると、時間を節約し最適なスキャン位置を決定するのに役立ちます。また、障害物、電源要求、追加の機器の必要性など、スキャンプロジェクトに影響を与える可能性のある、その他の物理的制限を特定するのに役立ちます。プロジェクトサイトが既設の屋外構造物である場合は、Google Earth またはその他の衛星画像を印刷すると、スキャン戦略をうまく整理することができます。

手描きのスケッチも効果的なツールです。
ファイル名
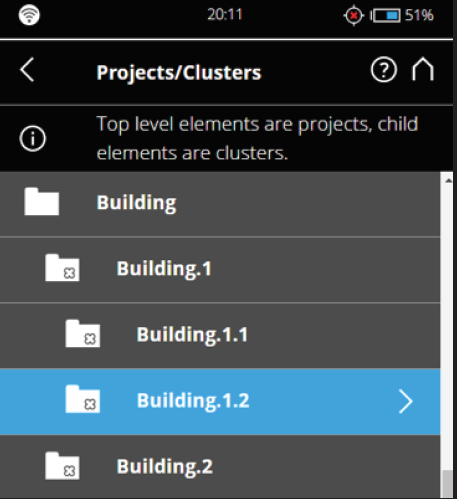
スキャナに大きなプロジェクトを設定するときは、クラスタとしてグループ化できる領域を特定すると、登録を簡単に行えます。プロジェクト名とサブプロジェクト名は、[管理] > [プロジェクト/クラスター] で設定できます。
各スキャンプロジェクトおよびプロジェクト内のフォルダーに、意味を持つ名前を付けます。例えば、ケースまたはジョブ番号、クライアント名または番号、または番地なのです。複数階ある建物のプロジェクトは次のファイル構造を持つことができます。
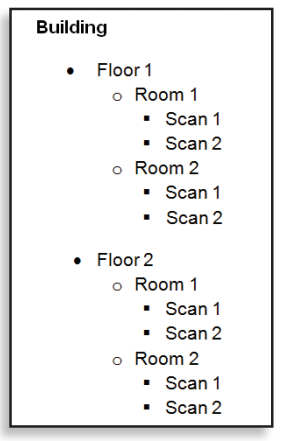
スキャナにこのファイル構造を作成する最も簡単な方法は、サブプロジェクトを追加し、スキャナが各サブプロジェクトおよび各スキャンに自動的に名前を付けることです。
装置の確認
- スキャナの三脚を確認して、すべての脚が安全にロックされ、スキャナが正しく取り付けられていることを確認します。
- スキャナの外殻に損傷または歪みが見られないか確認します。
- スキャナミラーに汚れ、傷、欠け、歪みがないか確認します。Laser Scanner のミラーのクリーニングについては、ここをクリック してください。
人工ターゲット
登録には、スキャンの調整に使用できる、スキャン位置固有の要素が必要です(勾配の道路標識、ドア、街灯など)。平坦な一本道、または角度のある部屋のような場所には、スキャン登録プロセスを助ける、人工的な目標が必要です。
球のターゲットは、ほぼすべての場所に配置でき、どの角度からでもスキャンすることができます。このため、架空のターゲットを付けることができないサイトに対してさまざまな選択ができます。FARO の球は精密に生産され、精度の閾値が厳密なプロジェクトに理想的です。

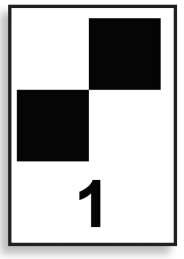
チェッカーボードのターゲットは、必要に応じて簡単に印刷、ラベル付け、およびサイズ変更することができますが、平らな表面ににも取り付け、スキャナに垂直に配置する必要があります。
コード化されたマーカーはチェックボードのように機能しますが、固有の番号を持つ光学的なバーコードを含みます。これらの固有マーカーによりスキャン位置を決定し、自動登録を容易にすることができます。SCENE をインストールした後に、
ターゲットの配置
人工ターゲットのガイドライン
- 登録には、少なくとも 3 つのターゲットが必要です。(傾斜計など、センサーデータを使用する場合は、2 つ)。
- ターゲットを配置して、スキャナからターゲットまで視線がクリアになるようにします。
- 各ターゲットが複数のスキャナ位置から見えるようにします。
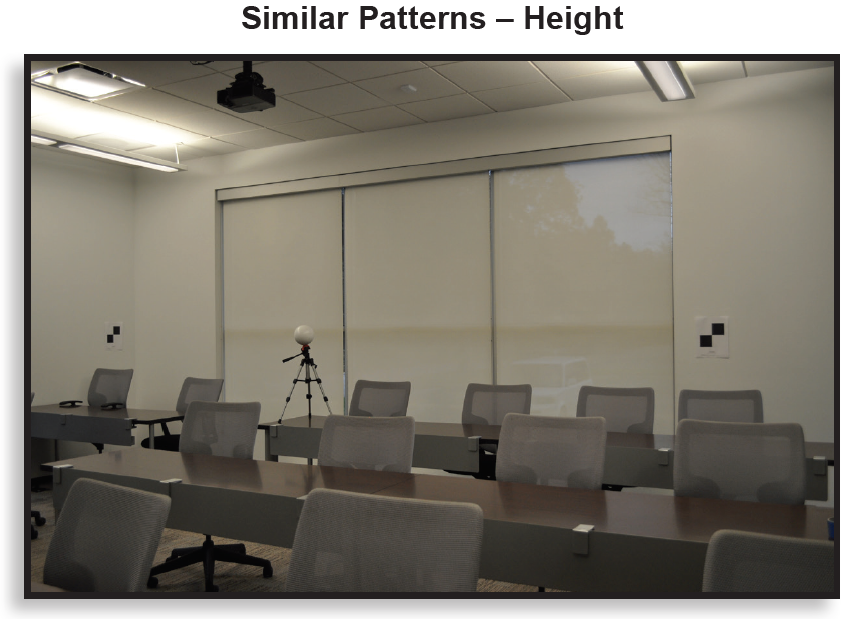
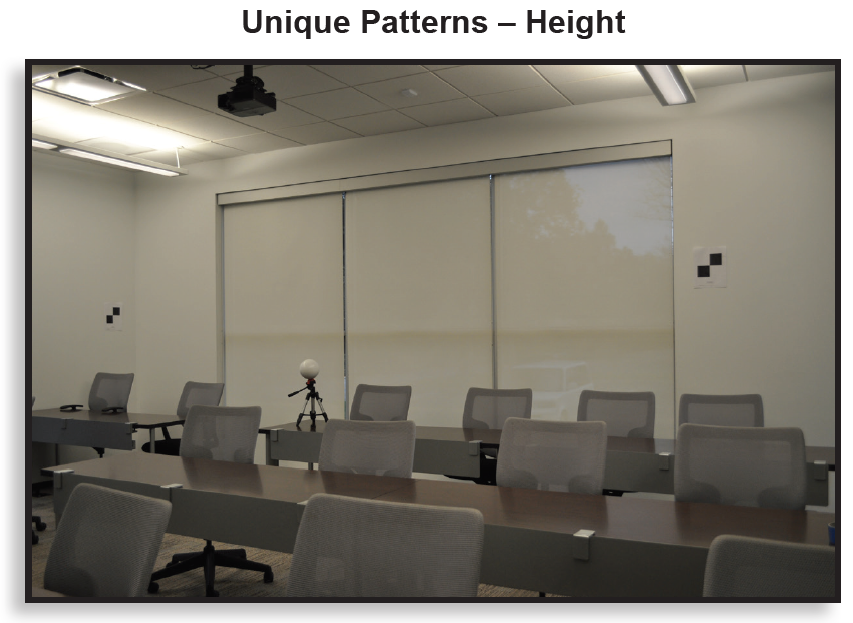
- ターゲットの高さと間隔を変更することにより、3次元の固有パターンにターゲットを調整します。
- スキャンプロセス中はターゲットを移動しないでください。
関連情報
バッテリー/延長コード
必要な電力は、スキャンプロジェクトのタイプによって異なります。必要に応じて、バッテリー充電時間とコンセントの使用を適切に計画します。長時間のスキャンプロセス中、スキャナーをコンセントに差し込む場合は、電源コードに引っかかって損傷を受けないよう、コード保護具の使用を検討します。
精度チェック
FARO スケールバーまたはメーター/ヤードスティックなど、長さが判明しているアイテムを最初のスキャン領域に配置すると、登録後にスキャン精度を確認することができます。精度要求の高いプロジェクト向けに、FARO スケールバーは、1500mm の長さで認定されており妥当性確認に使用出来ます。


スキャナ位置の数
スキャナ位置を最小限に抑えることにより、スキャン時間が短縮され、点群が適切にキャプチャされます。サイトスケッチを使用して、最適なスキャン位置を特定します。各スキャンが他のスキャンと重なる位置にスキャナを配置します。スキャン領域には、スキャンを登録するのに役立つ固有の自然ターゲットが含まれている必要があります。対象オブジェクトに応じ、360°の全体スキャンが毎回必要とは限らないことを覚えておいてください。出入口のような移動エリアを必ずスキャンし、登録を補助してください。
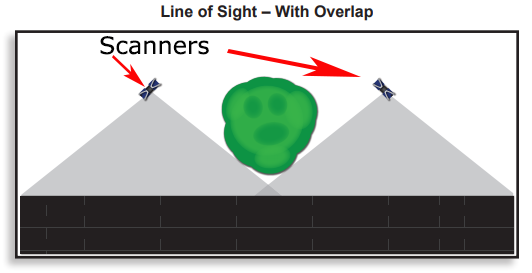
視線
木や柱などの障害物があれば、すべてのスキャンデータがオブジェクトの周りをキャプチャできるように、スキャン位置を調整する必要があります。複数回スキャンする、または複数のスキャナを使用する場合は、スキャン領域が障害物を超えて重なり合うようにします。
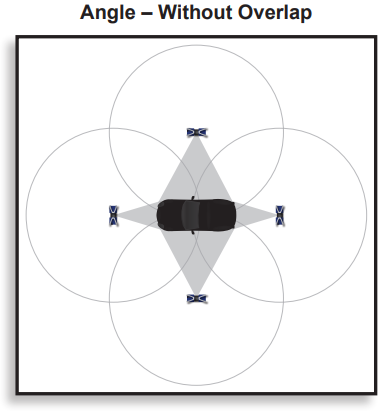
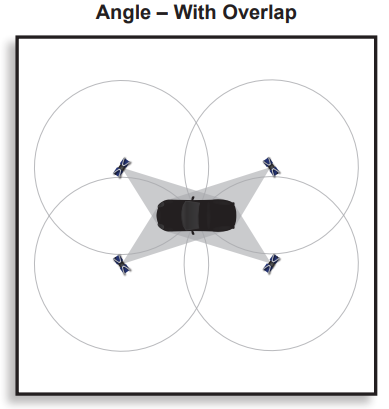
対象のオブジェクトの角度
異なる角度から複数のスキャンでキャプチャすると、三次元画像は最も完全になります。適切な角度を選択すると、必要なスキャンの数を減らすことができます。スキャナを対象オブジェクトに対して、必要な詳細をキャプチャするため最適な視線となるよう配置し、必ず領域が重なり合うようスキャンします。
二等分
スキャナの位置決めを回避し、開始/停止ポイントが対象オブジェクトまたは人工ターゲットになるようにします。開始/停止ライン、またはシームは、対象から外れた場所に向いている必要があります。
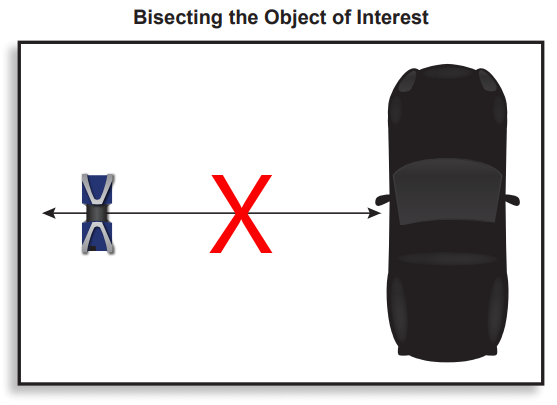
大まかな目安として、スキャナの横側に位置するスキャナのタッチスクリーンを使用しているときに、目的のオブジェクトと対面するようにしてください。
スキャン順序の問題
論理的な順序でスキャンすると、登録が簡単になります。対象オブジェクトの周りを回る、または構造物に沿って直線的に処理すると、スキャンの追跡と登録が簡単になります。プロジェクト領域のスケッチに従うほど、後にスキャンを登録するのが難しくなります。
平面のスキャン
スキャンの対象オブジェクトが水上のボートのような動きのある平面上で停止している場合、スキャナーを同じ動く平面に置くことで、測定データに影響を与える微細な動きを防ぐことができます。
ScanPlan とスキャンアシスト
ハンドヘルド 2D スキャナのFARO ScanPlan では、建物の見取り図を素早く作成できます。ScanPlan のスキャンアシストモードを使用すると、Focus スキャナの位置決めで最適な場所を位置が示されます。スキャンアシストの使用方法の詳細については、この記事をご覧ください。
スキャン分解能
スキャン分解能とは、収集された点群数、と点間の距離を表します。必要な詳細レベルに基づいて解像度を選択すること、対象オブジェクトまでの距離と、ターゲットまでの距離を選択します。
一般的な分解能ガイドライン
- 1/1 または 1/2 - オブジェクトおよび小さい領域
- 1/4 または 1/5 - 屋内および広い屋内スペース
- 1/8 または 1/10 - 屋内および狭い屋外スペース
スキャン品質
スキャン品質は、スキャナが点群を確認するために行った測定の数を指します。この設定を増やすことにより、スキャン精度が向上しますが、スキャン時間も増加します。品質設定には、ノイズ低減も採用しています。これは、スキャンの点群差がオブジェクトの詳細、またはノイズによるものかを決定するアルゴリズムです。
一般的な品質ガイドライン
- 2x – 最適な条件(良好な光源、良好な天候)と時間が重要なとき
- 3x – 屋内または曇天の屋外
- 4x – 晴天時の屋外で測定が必要な場合、または悪天候のとき
縦/横
この設定は、スキャナのスキャン領域を制限することができ、180°スキャンまたは他のサブセクションが可能です。
注記:この設定は永続的であるため、次のスキャンに進むときにリセットすることを忘れないでください。
色
スキャン領域が非常に暗い、または時間が要素である場合、カラーをオフにすると、スキャン時間が短縮されます。
注記:スキャナの近赤外線の性質や、反射/強度の値により、未処理スキャンの表面の一部が色あせて見える場合があります。スキャンがカラー処理されると、これらの詳細が表示されます。
露出測定
- 均等加重:光源が比較的均一である場合、この設定はその場全体からの光を使用し、時間が短縮されます。
- 水平加重 頭上からの明るい光源を使用する環境に最適です。カメラは水平レベルからの光を使用します。
- 天頂加重 明るい光源が目の高さ、またはそれより下から得られる環境に最適です。カメラは上からの光の情報を使用します。
定義済みのスキャンプロファイル
プロジェクトのニーズを決定する最速の方法は、スキャナの定義済みスキャンプロファイルを使用することです。
新しいモデル: Focus Core, Focus Premium, Focus Premium Max
| プロファイル | 使用時 | 分解能 | 品質 | 色 | センサー |
|---|---|---|---|---|---|
| 加速 | 屋内、スキャナと対象物の距離が10m以下 | 1/8 | 3X | オフ | オン |
| スタンダード | 屋内、スキャナと対象物との距離が10m以上の場合 | 1/5 | 3X | オフ | オン |
| 拡張 | 屋外、スキャナと対象物の距離が20m以上ある場合 | 1/4 | 3X | オフ | オン |
| オブジェクトHD1 | 高解像度スキャンによる近接対象物への対応 | 1/2 | 4X | オン | オン |
| フラッシュ2 | 屋内、スキャナと対象物の距離が10m以下 | 1/43 | 2x | オン | オフ |
注1: Object HDプロファイルは、8MPxの解像度の内蔵カメラを使用します(高解像度設定のみ13MPxを使用)。また、近距離の被写体には近距離設定を使用します。
注2: Flashプロファイルは、FARO Streamアプリを使用し、有効なライセンスがある場合にのみ利用できる。Flashは、Ricoh Theta Z1とPanoCamアクセサリーを使用し、精度の低い大まかな傾斜計の測定値を使用する。
注3: 垂直分解能1/4、水平分解能3 rpm(10 s)
一般的な情報
上記の定義済みプロファイル(Flashには無効)をカスタマイズしてクローンしたり、新しいプロファイルを作成することが可能です。環境固有のスキャンには、カスタマイズしたプロファイルを使用してください。ストリームプロファイルは、複数のデバイス間での競合を避けるため、Focusスキャナーとは同期されません。
レガシーモデル: FocusS, FocusS Plus, FocusM
| プロファイル | 使用時 | 分解能 | 品質 | 色 | センサー |
|---|---|---|---|---|---|
| 屋内 ...10m | 屋内、スキャナーと対象オブジェクトの距離は10m未満 | 1/8 | 3X | オン | オン |
| 屋内 10m... | 屋内、スキャナーと対象オブジェクト間の距離は10m超 | 1/5 | 4X | オン | オン |
| 屋内 HDR | 屋内、スキャナとオブジェクト間の距離は、HDR品質で 20m 未満 | 1/5 | 4X | オン | オン |
| 屋外 ...20m | 屋外、スキャナと対象オブジェクト間の距離は 20m 未満 | 1/5 | 4X | オン | オン |
| 屋外 20m... | 屋外、スキャナと対象オブジェクト間の距離は 20m 超 | 1/4 | 4X | オン | オン |
| 屋外 HDR | 屋外、スキャナと対象オブジェクト間の距離は、HDR品質で 20m超 | 1/4 | 4X | オン | オン |
| プレビュー | クイック、低分解能スキャン | 1/16 | 4X | オフ | オフ |
| オブジェクト HD | 高分解能スキャン | 1/2 | 6X | オン | オン |
| 屋外:遠距離 | スキャナと対象オブジェクト間の距離は 20m 超で、スキャナに近いオブジェクトの測定精度は必要ありません。 | 1/4 | 4X | オン | オン |
定義済みスキャンプロファイルは必要に応じて変更することができ、個々のニーズに合わせてカスタムスキャンプロファイルを追加できます。
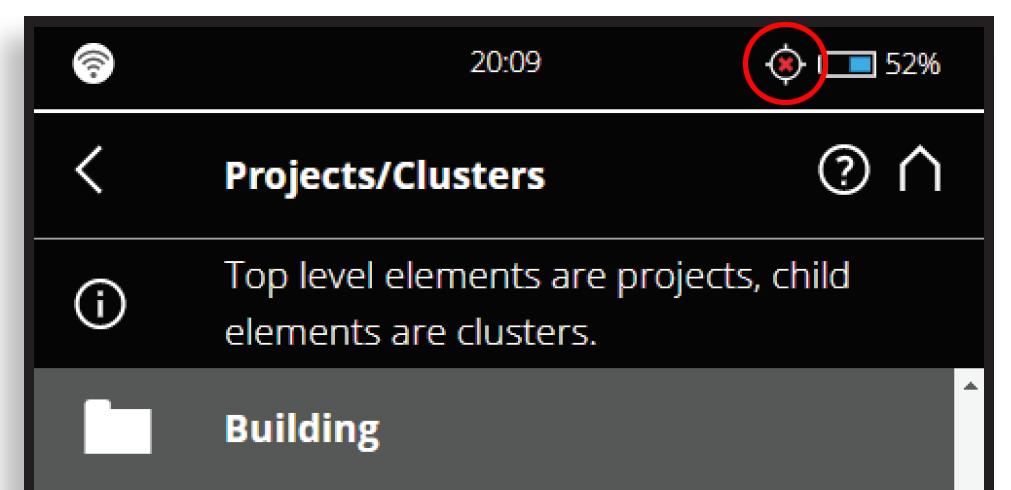
傾斜計
スキャナーの位置を調整して、傾斜が+/-5°となるようにスキャナを配置します。ステータスバーに傾斜警告アイコン  は、スキャナの現在の傾斜が 2°を超えている場合にのみ表示されます(アイコンが黄色になります)。また、スキャナの傾斜が 5°を超えると赤色になります。
は、スキャナの現在の傾斜が 2°を超えている場合にのみ表示されます(アイコンが黄色になります)。また、スキャナの傾斜が 5°を超えると赤色になります。
ホーム > パラメータ > センサを選択を選択することによって、傾斜計を水平にできます。傾斜計がスキャナの上部に取り付けられている場合、ビューには気泡水平器が表示されます。
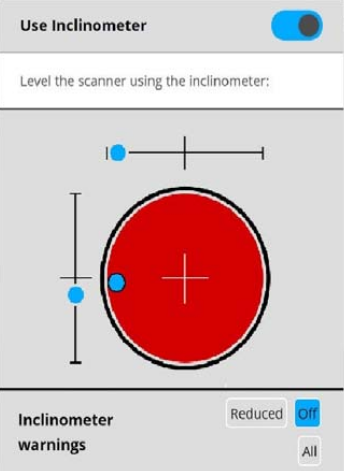
SCENE におけるスキャン登録に傾斜計の傾斜測定値を自動的に使用する機能を有効と無効で切り替えることができます。ただし、ユーザーの設定とは関係なく、傾斜センサーのデータの測定と各スキャンへの添付は常時行われています。傾斜計データの使用機能をオンにすると、傾斜計データは SCENE におけるスキャンの登録に自動的に使用され、オフにするとデータは無視されます。
上下を反転してスキャンする場合は、傾斜計をオフにする必要があります。
注記:屋外または表面が不安定な領域でスキャンする場合は、次のスキャンに進む前に、傾斜計の気泡を再確認します。管理 > センサ > 傾斜計を選択します。傾斜計が赤いゾーンになる場合は、スキャナーを再度水平にし、三脚の脚が安全で安定していることを確認し、再度スキャンします。
悪天候
- 雨 - 分解能を下げてスキャンする水滴数を減らし、測定データを確認するため品質を高めます。
- 霧 - 分解能を 1/4 または 1/3 に上げ、3x、4x の品質を使用します。
- 強風 - 三脚の高さを下げ、8~10 ポンドのサンドバッグを使用して三脚を固定します。注意:スキャナを強風の中放置しないでください。
- 高温 - 強い直射日光、または40°C(104°F)を超える気温の中で操作する場合、熱保護カバーによりスキャナを保護し、操作時間を延長することができます。
扱いが難しい表面
- 明るい – 明るい表面は、スキャンノイズや、測定データの損失を引き起こす可能性があります。スキャン品質の上げることで、表面からの影響を低減することができます。より厳しい状況では、マスキングテープやペインターズテープで表面を覆います。
- 反射する– 鏡やその他の非常に反射性の高い表面により、スキャンが困難になります。茶色の紙やテープで表面を覆うことにより、影響を最小限に抑えることができます。
- ガラス – ガラス面を通した測定は、再現性のある正確な結果を得ることはできません。ガラス表面に非常に特殊なコーティングを施さない限り、後方反射が発生し、半径方向の測定に影響を与える可能性があります。ガラス表面に適切なコーティングを施して反射を防止または最小化した場合でも、ガラスはビームが通過する空気とは異なる屈折率を持っています。この屈折率の変化は、半径方向の距離測定に誤差を生じさせ、また、ビームが「曲がる」、つまり、トラッカーからターゲットまでまっすぐな経路を通らなくなる結果をもたらします。このビームの曲がりは、スキャナーからの測定に影響を与えます。また、ビームがガラス窓に入射する角度が変わると、曲がりの性質が変化し、精度と再現性の両方が損なわれることになります。
- 水– 水の光を屈折率が高め、信頼できるスキャン結果を得ることができないため、避けるべきです。
- 非常に高温の表面– FAROスキャナーは赤外光で動作します。したがって、ターゲットの温度を超えた場合、最も重要なのは輝度、または赤外線スペクトル内で放射される光の量です。すべてのアイテムはIRを放出し、それらの放出するIRの量は、温度が上昇するにつれて増加します。非常に高温のアイテム(摂氏数百度を超える)は、反射するよりも多くのIRを放出する傾向があります。これらの極端な温度では、スキャナーから放射されたすべてのレーザー出力が反射して戻ることはほとんどありません。この状態により、スキャンデータが欠落したり不正確になったりする可能性があります。 一般的に、500℃以上の高温の物体をスキャンすることは、結果が予測できないためお勧めできません。
オンサイト登録
レガシーモデル:FocusS、FocusS Plus、FocusM
オンサイト登録によりスキャンデータは、1 回のスキャンか、同時に処理した複数のスキャンかに関わらず、ワイヤレスでオンサイトの PC へ直接送信し、自動でアライメントすることができます。をダウンロードします。
新型モデル:Focus Core、Focus Premium、Focus Premium Max
現場での登録にはFARO Streamアプリ(GoogleおよびAppleストアで入手可能)の使用を推奨します。Streamは新規キャプチャしたスキャンを自動的に登録します。Streamは自動上面図およびクラウド間ベースの登録を採用しています。この自動登録は各スキャン完了後に自動的に実行されます。Streamでは手動登録やスキャン接続の追加も可能で、最終処理ステップとしてSCENEでの精密登録に活用できます。
詳細はStreamマニュアル「Focusスキャン登録」の章を参照してください。
スキャナの安全性
- 注意:スキャナを放置しないでください。
- 可能な限りスキャン領域のトラフィックを制限します。
- 三脚の脚にマスキングテープを貼り目立たせるか、適切なサイズにカットした棒状の浮き具でカバーします。
- スキャナに取り付けられている場合は、コード保護具を使用して、電源コードを覆います。
- スキャナを三脚に移動する場合は、常に片手でスキャナを持ちます。
- 不安定な地面(砂、固まっていない泥、工業グレーチングなど)では、振動抑制パッドを使用したり、三脚の脚にテニスボールに挿入したり、古いコンパクトディスクまたは家具スライダーの上に脚を置いたりするなどの工夫をしてください。
PanoCam
PanoCamアクセサリーは、カラー化された360°写真を1秒でキャプチャすることで、スキャンプロセスを迅速化します。
すべてのV8およびV9 Focusスキャナー用:
| モデル | ハイダイナミックレンジ(HDR) |
|---|---|
| Focus V8 遺産: FocusS, FocusS Plus, FocusM | 入手不可 |
| Focus V9: Focus Core, Focus Premium, Focus Premium Max | オプション設定 |
一般的な情報
- FARO PanoCamマウント(FARO品番ACCS-0016)を使用して、パノラマカメラをFocusスキャナーに取り付けます。Ricoh Theta Z1 カメラにのみ適用できます。最新のFocusおよびRicoh Theta Z1カメラのファームウェアを使用してください(https://support.theta360.com を参照)。
- 注意 リコーシータZ1とPanoCamマウントを組み立てる際、カメラのネジを締めすぎないでください。カメラやマウントが破損する恐れがあります。カメラネジの締め付けは、常に同じ力と方法で行うことをお勧めします。詳細については、『Focus ユーザーマニュアル』を参照してください。
- スキャンのカラー化を最良の結果にするためには、PanoCamマウントとRICOH Theta Z1を組み立てた後、PanoCamキャリブレーションスキャンを行う必要があります。現在、Sphere XGでPanoCamスキャンを処理するには、アップロード前に各プロジェクトでPanoCamキャリブレーションスキャンをキャプチャする必要があります。
- PanoCamマウントとフォーカススキャナーのコネクタ接点を時々クリーニングすることをお勧めします。綿棒とイソプロピルアルコールを使用してください。
ストレージ
すべてのV8およびV9 Focusスキャナー用:
| モデル | ソリッド・ステート・ドライブ(SSD) |
|---|---|
| Focus V8 遺産: FocusS, FocusS Plus, FocusM | 使用不可、SDカードのみ |
| Focus V9: Focus Core, Focus Premium, Focus Premium Max | 内蔵SSDまたはSDカードでの動作 |
一般的な情報
スキャンプロジェクトは、ストレージ管理の設定に応じてSSDまたはSDカードに保存されます。SSDに保存されたプロジェクトはSDカードにエクスポートできます。内蔵SSDの使用を強くお勧めします。SDカードを使用し、SDカードの自動同期を設定すると、スキャンの取り込み時間が長くなります。設定は、[管理] > [ストレージ管理]で確認できます。
注意:プロジェクト内のすべてのスキャンは、同じストレージメディアに保存する必要があります。スキャンプロジェクト中に内部ストレージ(SSD)とSDカードストレージを切り替えないでください。