USB FaroArmドライバ6.1.0以降を使用したLaser Line Probe(LLP)の補正

クイックステップ
- こちらをクリックし、お使いのコンピュータにインストールされているドライバのバージョン番号を確認し、正しい手順に従って下さい。バージョン番号が6.1.0以降の場合は、この項の手順を使用してください。それ以外の場合は、 こちらをクリックし、以前の手順を使用してください。
- FARO® Laser Line Probe(LLP)の補正に関する段階的な手順については、最新のFAROArmマニュアルをダウンロードしてください。
- マニュアルを開き、[検索]欄にLaser Line Probe補正を入力して、段階的な手順を見つけます。
- 手順を読み、この項では、ビデオ、ヒント、および手順を確認してください。次に、補正を行います。
ビデオ
このビデオでは、FARO Laser Line Probe (LLP)の補正手順をご覧ください。
概要
プロジェクトで最も正確な計測結果が得られるように、測定プロジェクトを開始する前に、常にLLPを補正します(校正と呼ばれることもあります)。6.1.0 ドライバがリリースされた2018年2月現在、LLP補正方法は変更されています。この動作は、LLPの位置および方向を厳密に制御するように設計されています。LLPをプレートからあらゆるところに移動させながら、補正プレートの複数の象限をカバーするようにできています。誰が補正をしても、結果は非常に一貫性があり、繰り返しが可能です。
6.0以降のFaroArmドライバには、スタンドアロン測定ソフトウェア を使用せずにFaroArmとLLPを補正できる補正機能を備えたFaroArm Managerが同梱されています。LLPまたはScanArmでFaroArmを接続できるコンピューターにドライバをインストールするだけ使用可能です。
補正を完了する手順は言葉で説明するのが難しいので、ビデオを準備しています。以下のヒントと手順のセクションでは、ビデオの重要な部分について説明します。ビデオを見ると、言葉で説明しているよりも補正がはるかに簡単とご理解いただけると思われます。
準備する
あなたの成功を確実にする前に、この表を確認してください。
| 完了までの時間 | 15分以下 |
| 必要なスキル |
|
| 前提条件 |
|
| 互換性 | さまざまなドライババージョンのコンピューター・プロセッサを、どのMicrosoft Windowsバージョンがサポートしているかの詳細については、こちらをクリックしてください。 |
ヒント
ビデオのデモンストレーションを見ながら、これらのハイライトを探してください。
- キャリブレーション/補正プレートを使用する前に、プレートの下面とその上に置かれる面を清潔にし、汚れがないことを確認してください。プレートの白色面の平坦度の仕様は、0.001インチ(0.0254mm)です。このディメンションは追跡可能な仕様ではなく、認証プロセス中に検証されません。
- オペレーターは、LLPをプレートへ至るところに移動させながら、補正プレートの4つの位置をカバーする一連の5つのストロークを行います。
- オペレーターが方向を変え、各ストロークを取るとき、FaroArm Managerソフトウェアの補正パネルの右側インジケーターを見てください。(詳細については、以下の手順のセクションを参照してください)。オペレーターは、すべてのインジケーターを可能な限り緑色の範囲に保ちます。
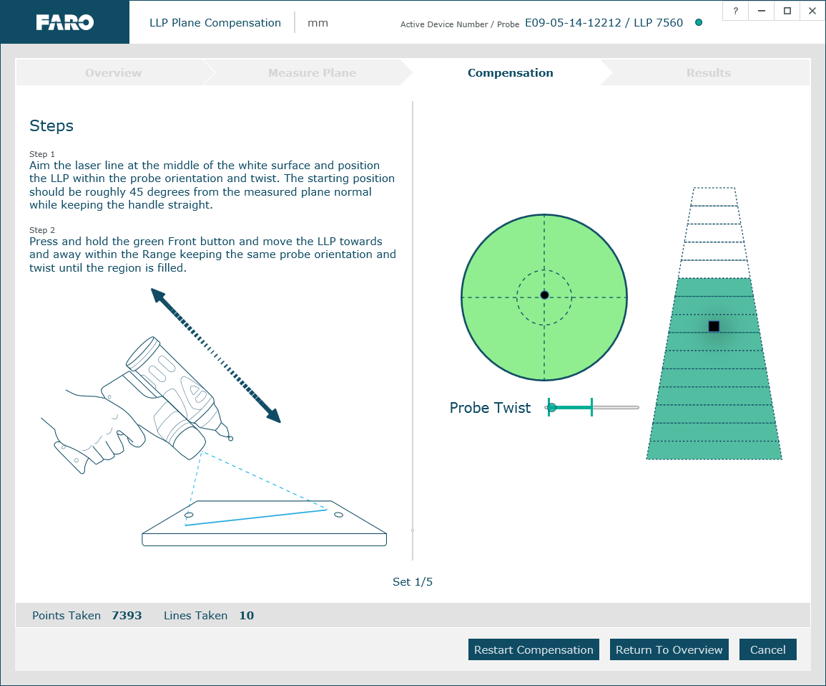
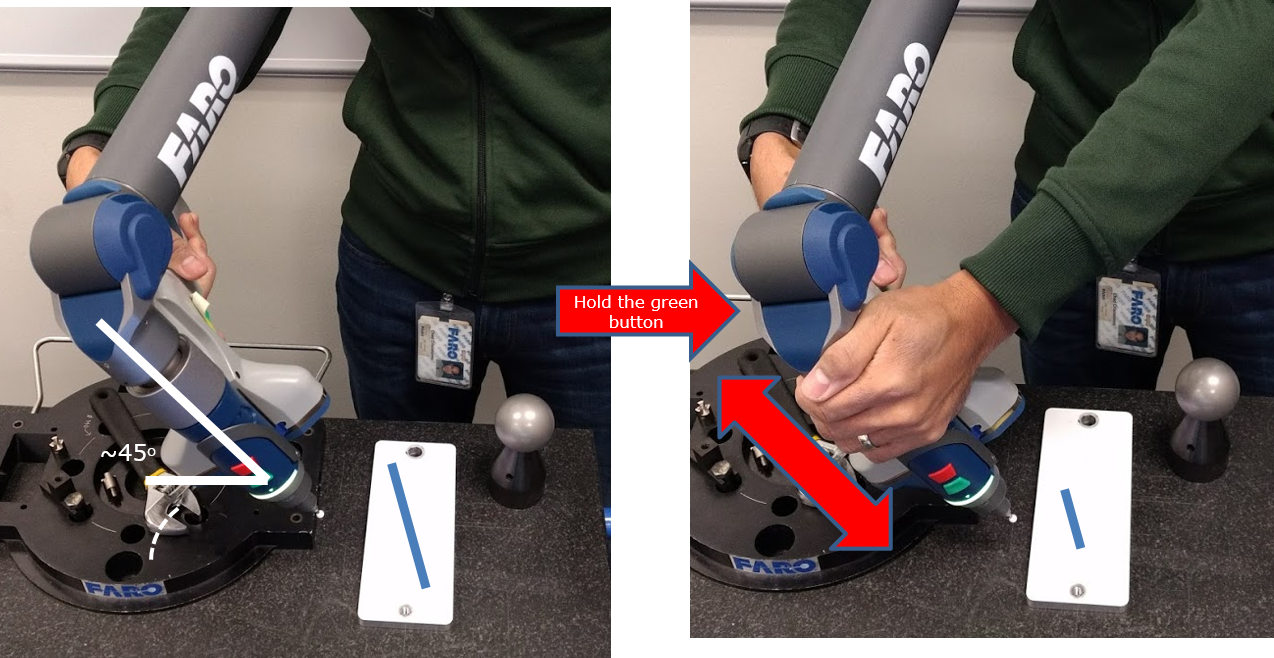
- 円形レーダーインジケーターは、プレートに対するLLPの向きおよび角度を評価します。角度を約45°に保つようにしてください。緑色は、LLPが正しく角度に向けられていることを意味します。他の色は、オペレーターがLLPの角度または向きを修正しなければならないことを意味します。
-
プローブのねじれインジケーターは、ストロークを作るときにLLPハンドルがねじれているかどうかを評価します。緑色は、ねじれていないことを意味します。他の色は、オペレーターがハンドルを安定して保たなければならないことを意味します。
- 台形インジケーターは、ストロークの範囲と確かさを評価します。レーダーとプローブ ツイスト インジケーターが緑色である限り、オペレーターは下から上に緑色のバーで台形を完全に塗りつぶすことができます。これはストロークが正しいことを意味します。他の色は、オペレーターがストロークの角度とねじれ、およびプレートのカバレッジを調整する必要があることを意味します。プレートをカバーするために、オペレーターはストロークを作る間、レーザーラインをプレート上に保たなければなりません。
- すべてのインジケーターが緑色で台形インジケーターが完全に塗りつぶされている限り、オペレーターのストロークがプレートから遠くから始動するか、近くから始動するかは、関係ありません。
- オペレータがストロークを遠くから近くに移動するに時、またはその逆の場合も、LLP レーザー光線をプレート上に待機したままにします。
- 最良の結果を得るために、オペレーターはレーダーインジケーター上の黒い点を可能な限り中央に近づけて保持します。
手順
ビデオで、何が起きるかが確認できます。ご覧いただくと、オペレーターがこれらの各手順をどのように行うか分かります。ここに記載されている情報よりも、さらに情報が必要な場合は、最新のFAROマニュアルをダウンロードし、Laser Line Probe補正を検索してください。
補正セットアップ
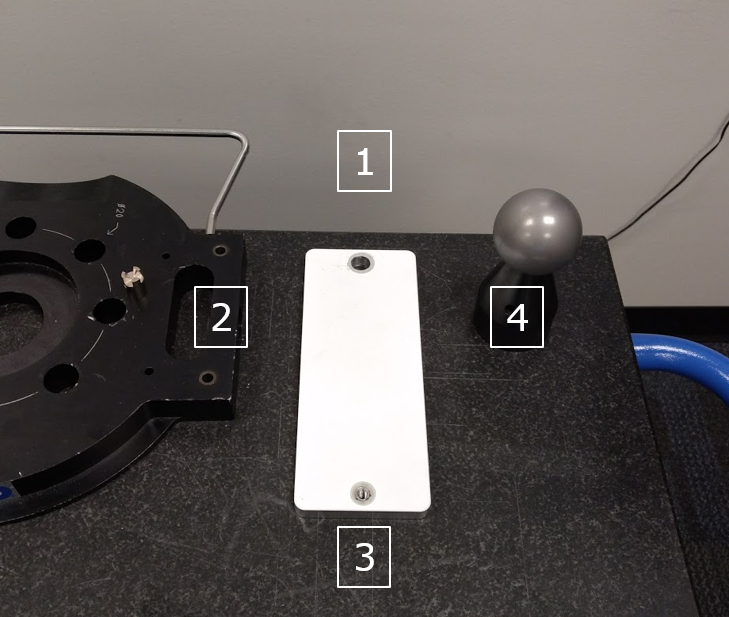
- この画像に示すように、補正板を作業台の表面から遠くに置き、1の位置の台の後ろに立てます。
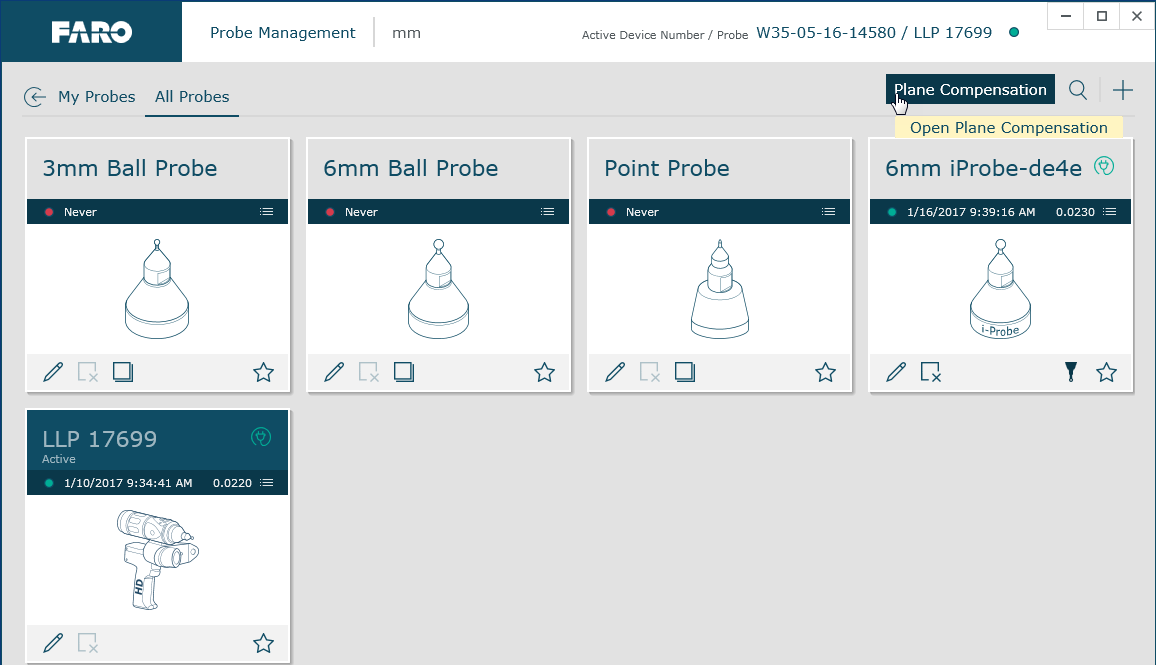
- FaroArmの電源を入れ、FaroArmドライババージョン6.1以降を起動しているコンピューターに接続します。Windows[スタートメニュー]から、[FARO]>[FaroArm Manager]>[プローブ管理]をクリックします 。[プローブ管理パネル]が表示されます。
- FaroArmに取り付けられているハードプローブのタイプをクリックし、孔による補正方法で使用しているハードプローブを補正します。この方法がわからない場合は、最新のFAROマニュアルをダウンロードし、[検索]欄にプローブ管理を入力してください。
- ハードプローブを補正した後、 [プローブ管理]パネルをクリックし、[Laser Line Probe]をアクティブにしてください。次に、右上隅にある [平面による補正] をクリックします。。[補正の概要]パネルが表示されます。
- 次に、少なくとも8つの点を使用して、補正板を平面として測定するため、[平面の測定]をクリックします。この方法がわからない場合は、最新のFAROマニュアルをダウンロードし、そして[検索]欄にLaser Line Probe補正を入力してください 。成功インジケーターが表示されたら、[補正を開始する]をクリックします。[補正パネル]が表示されます。
補正
- プレート上の位置1をカバーするには、プレートに垂直に向けられたLLPでストロークを開始し、プレートの中心にレーザーラインを直接向けます。[補正パネル]には 、レーダーインジケーターは中央に黒い点を表示されます。そうでない場合は、点が中央にくるまでLLPを移動します。
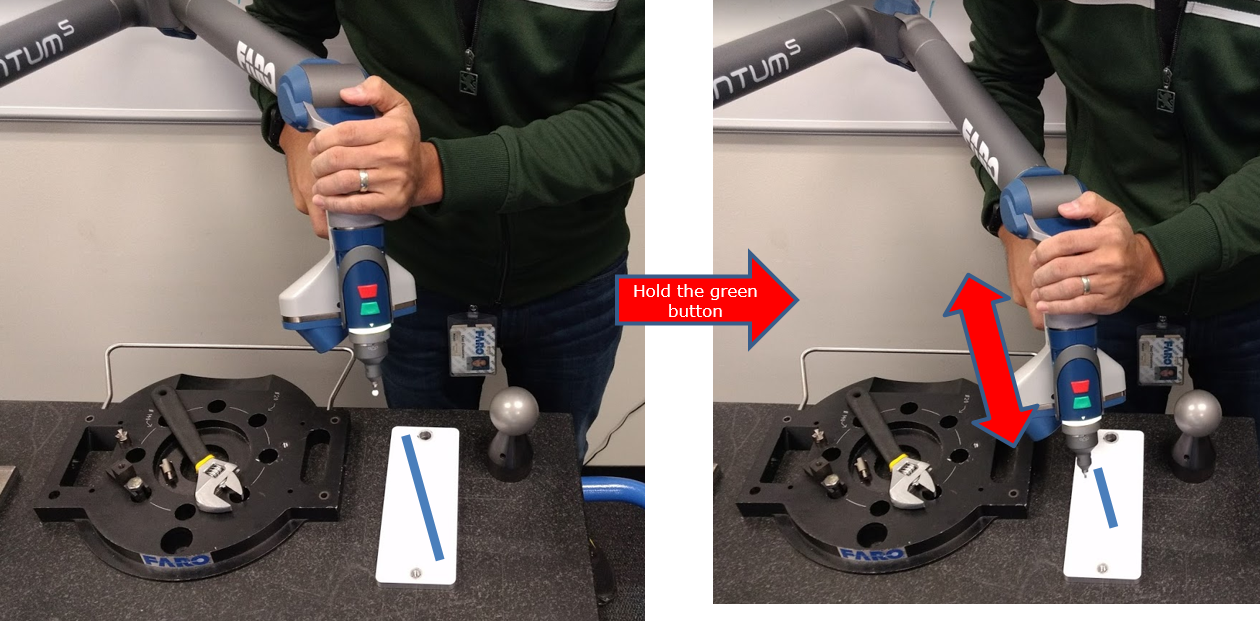
- LLPを自分の方に45°傾け、緑のボタンを押したままデータを収集します。台形が緑色のバーでいっぱいになるまで、LLPをプレートから遠くに、近くにと動かしてください。黒い点を中央に、その他のインジケーターを緑色に保つようLLPを動かしている間、補正パネルのレーダーインジケーターを忘れずに見てください。常にレーザー線をプレート上に保ってください。台形のインジケーターがいっぱいになったら、緑色のボタンを放して、次に進みます。
- ポジション2をカバーしてストロークを開始するには、LLPを垂直に戻し、レーダーの中心に黒い点を合わせ、すべてのインジケーターを緑色にします。LLPを右に45°傾け、緑色のボタンを押してデータを収集します。台形が緑色のバーでいっぱいになるまで、LLPをプレートから遠くに、近くにと動かしてください。レーダーインジケーターを見て、黒い点を中央に、すべてのインジケーターを緑色に保ってください。 台形内がいっぱいになったら、緑色のボタンを放して、次に進みます。
- 位置3をカバーしてストロークを開始するには、LLPをプレートの底に向かって動かします。LLPを垂直に戻し、レーダーの中心に黒い点を合わせ、すべてのインジケーターを緑色にします。LLPを45°傾けて、緑色のボタンを押したままデータを収集します。台形が緑色のバーでいっぱいになるまで、LLPをプレートの遠くから近くにと動かします。インジケーターを見てください。台形内がいっぱいになったら、緑色のボタンを放して、次に進みます。

- 位置4をカバーしてストロークを開始するには、LLPを垂直に戻し、レーダーの中心に黒い点を合わせ、すべてのインジケーターを緑色にします。LLPを左に45°傾け、緑色のボタンを押してデータを収集します。台形が緑色のバーでいっぱいになるまで、LLPをプレートの遠くへ近くへと動かします。インジケーターを見てください。台形内がいっぱいになったら、緑色のボタンを放して、次に進みます。

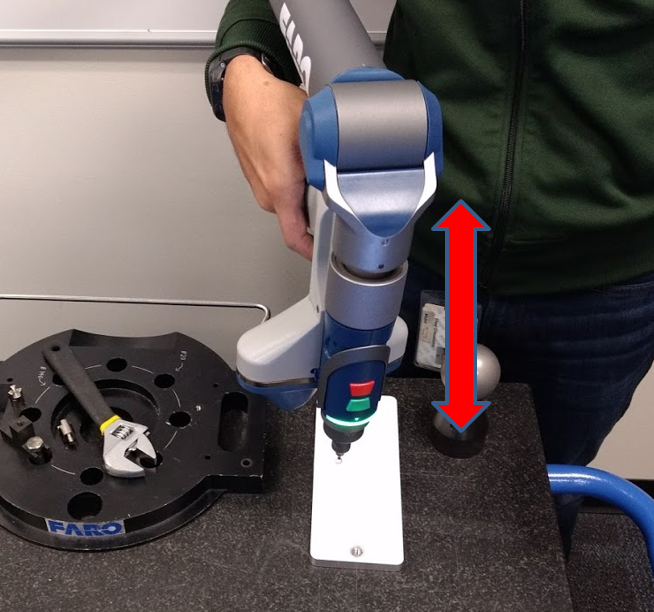
- 最後の5回目のストロークでは、LLPを垂直に戻し、レーザラインをプレートの中央に直接向けます。レーダーインジケーターは中央に黒い点を表示します。緑色のボタンを押したままにします。台形が緑色のバーでいっぱいになるまで、LLPをプレートの遠くへ、近くへと移動させます。インジケーターを見てください。台形内がいっぱいになったら、緑色のボタンを放してください。補正が完了です。
- FaroArm マネージャーは補正ポイントを計算します。完了すると、 [結果]パネルが表示され、成功ステータス 、 と補正誤差と機器仕様を表示します。[保存・終了]をクリックします。
これで補正が完了しました
関連項目
キーワード:
ScanArm、Scanner、校正、校正、llp 校正、Laser Line Probe 校正、llp 設定、レーザー補正、補正、補正